「ロボット社会」に向けた、日常社会で活躍するロボットの研究
自動運転車や無人店舗など、高度な人工知能を備えた情報システムの利用がリアル空間へと広がり続けています。こういった「ロボット社会」化に向けて、センサ情報をもとに実空間においてリアルタイムに行動する実体を持ったエージェントを広く「ロボット」としてとらえ、人々と共存・協調して活動する「人らしいロボット」などの様々なロボットの実現を目指します。そのために、知能ロボティクス,インタラクション,センサネットワーク,人工知能などに関する基礎研究を進め、サービス産業,協調作業,高齢者支援,学習支援,ヘルスケアなどの応用に結び付けていきます。以下に、研究テーマの一例を示します。
センサネットワーク技術
人々の日常行動をモデル化し理解するためのセンサネットワーク技術や、それを用いて活動するロボットを実現するネットワークロボット技術の研究を進めています。Deep learning(深層学習)等の最新技術も用いて人々の社会的な行動を認識する研究や、ショッピングモールでの1年にわたる移動行動の観測データ等の日常行動の「ビッグデータ」から有意義な情報を取り出す、といった最先端の研究に取り組みます。
実際のショッピングモールで人々の位置やロボットとのインタラクションを計測したデータセットの公開もしています。<link>
ヒューマンロボットインタラクション技術
ロボットが人と上手くかかわりあえるようにするために、インタラクションの中にある「人らしさ」を実現する処理のエッセンスを取り出して利用する方法などを研究しています。
これまでに、視線、指さし、タイミング、立ち位置、話しかけ方、配り方、など、様々な振る舞いの中にある「人らしさ」を、人工物であるロボットに再現する、振る舞いのモデル化の研究を進めて来ました。1対1のインタラクションを超えて、複数人との対話や複数ロボットの連携についても研究を進めています。また、人の認知情報処理をモデル化することで、人と同じように環境を理解して適切な道案内を行う技術を実現しました。並んで歩くインタラクションを再現するために、互いに相手の一歩先を予想しあって歩くという計算モデルを構築し、円滑な歩行インタラクションも実現しています。
人々と「人らしいロボット」との関わりあいの解明
上記の技術群を基盤に、世界に先駆けて、実際の日常環境でのフィールド実験に取り組み、人々と「人らしいロボット」との間にどのような関わりあいが起きるか、ロボットが実社会の中でどのような役割を持ちうるのか、明らかにする研究を進めています。これまでに、小学校、科学館、ショッピングモール、デイケアセンター、といった日常生活場面でフィールド実験を進め、ロボットが効果的な役割を持つ場面を見出してきました。長期的な相互作用の問題にも取り組み、長期的に関わったユーザがロボットをまるで人のように扱い、別れを悲しむ場面も観測してきました。一方で、このように「人らしさ」を持ちつつも、「ロボットは気兼ねしなくていい」、「先生には頼ってしまうが、ロボットとだと自分で考えることができた」、など人とは明確に異なった「ロボットらしさ」ももつ新しい存在として認知されていることも見出してきました。このように、「人らしいロボット」が、人でも機械でもない新しい社会的存在となりつつあることを明らかにしつつあります。



サイバーフィジカルシステム
人々の行動をモデル化してコンピュータ上で再現することで、人々の一歩先の将来行動を予期したり、システムが事前に計画を立てたりできるようにするサイバーフィジカルシステムを研究します。これまでに、人々の歩行時のインタラクションをモデル化する歩行者モデルを構築し、ロボットの周囲でおきる現象をコンピュータ上で再現しました。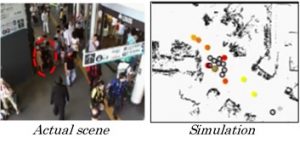 予測計算によって、人々が次々にロボットに群がる混雑現象や、子供のインタラクションがエスカレートして、ロボットをたたいたり、押したりする「ロボットいじめ」といった調和の問題を回避できました。
予測計算によって、人々が次々にロボットに群がる混雑現象や、子供のインタラクションがエスカレートして、ロボットをたたいたり、押したりする「ロボットいじめ」といった調和の問題を回避できました。
主な研究プロジェクト
国などの研究費の支援を受けて、以下のような研究プロジェクトを遂行しています。
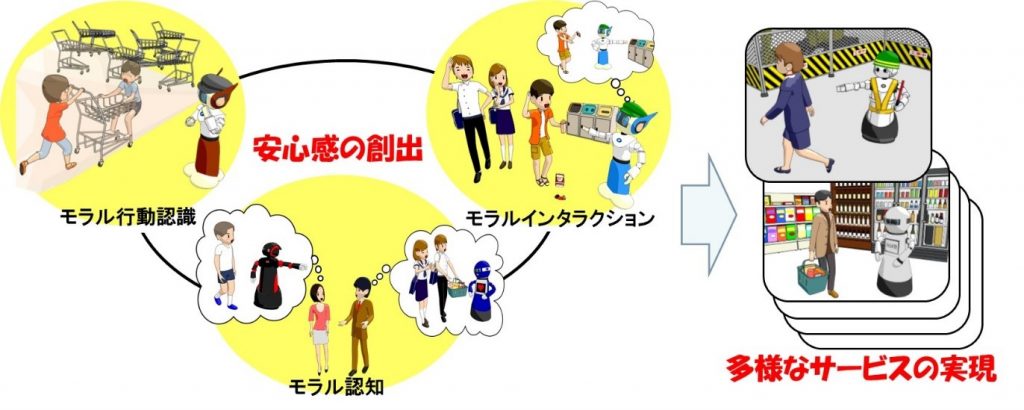
JST CREST 「街角環境で共生するロボットのインタラクション基盤技術」(2017年-2023年)
人工知能・ロボット技術の近年の進歩は目覚ましく、近い将来、
JST CREST 「ロボットによる街角の情報環境の構築」 (2010年-2016
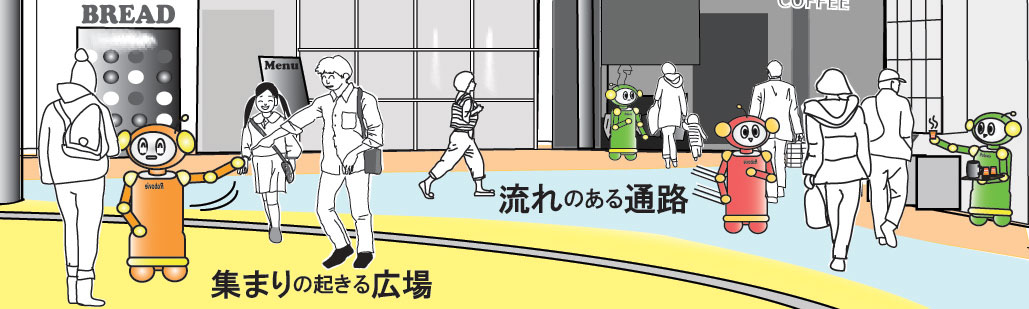
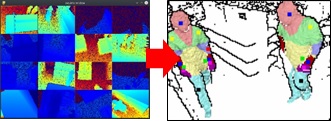
ショッピングモールのような人が行きかう街角の広場や通路において、センサネットワークを用いて街角の状況や場所の使われ方を理解するという街角環境理解技術、 ロボットが環境と調和して移動したり、人々に親和的に話しかけたりするためのインタラクション技術を研究しました。 街角を移動して人々と対話するロボットが、環境に調和して様々なサービスを提供できるような「ロボットによる街角の情報環境」の構築を進めました。 < link >